
Project Motivation:
Coastal waters are of considerable scientific, environmental, social, and economic interest, but marine phenomena to be studied are often extremely variable and energetic. These environments have the combined forces of tides, waves, and winds, as well as the mixing of fresh river water with salty ocean water. With so much to consider, resolving the collective dynamics is an especially challenging task.
In the context of marine energy, the performance of tidal current converters depends on the local water speed, with small differences in flow generating large differences in available power. For this reason, mapping currents in both space and time is of vital importance, allowing developers to confidently choose the best placement and assess the ultimate economic viability of a potential tidal power installation.
The µFloat project (pronounced “microFloat”) seeks to develop an underwater ‘float’ - a trackable, drifting sensor package - that is inexpensive enough to be deployed in swarms and thus perform simultaneous, distributed measurements of water speed in energetic tidal currents.

μFloat swarm construction. Top from left: main electronics tower; ME undergraduate Jack Ryan builds up top end-caps; end-caps with sensors; bottom end-cap with buoyancy engine support rods; buoyancy engine components: motor (top), piston (bottom-left), battery (bottom-right); bottom electronics mounts; half-assembled buoyancy engine. Bottom: μFloat subassemblies – electronics towers (left), top end-caps (center), buoyancy engine (right). Photo Credit: Trevor Harrison
Summary:
Credit: Trevor Harrison
Floats are oceanographic sensors that move up and down through the water column by adjusting their buoyancy, but otherwise drift passively with the local water currents. The µFloat system localizes them using acoustic modems located on GPS-tracked surface drifters.
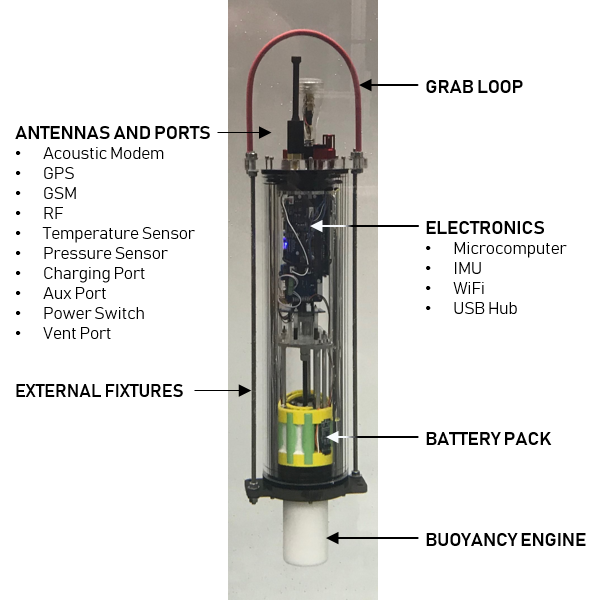
µFloat schematic. Credit: Trevor Harrison
While the driving application is measuring currents, the floats are designed for adaptability. With the integration of additional sensors, they could also be applied to other kinds of distributed measurements in coastal waterways, including acoustic monitoring, biogeochemical surveys or coordinated water sampling.
Development:
Development of the µFloat began in early 2016, when a senior undergraduate mechanical engineering team designed and built the first prototype (version 1) as a capstone project. Building on lessons learned from their work, we designed and built version 2 in late 2016 and early 2017. In summer 2017, we finished the first prototype and began testing. Also in 2017, we received funding to manufacture a swarm of 30 floats. In 2018, we overhauled the design once again to address prototype issues and improve manufacturability. Construction of the swarm began in summer 2018 and finished in early 2019.
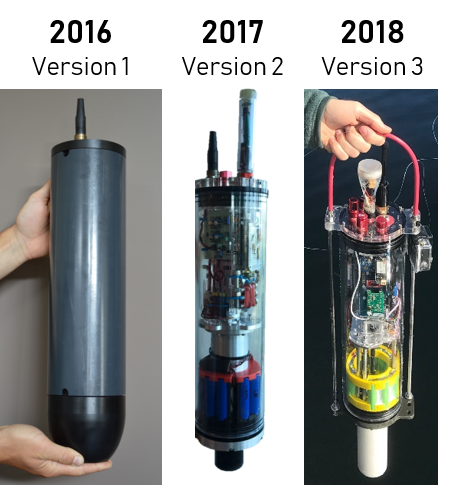
µFloat development history. Credit: Trevor Harrison
Field tests of the new floats began in May 2019 with deployments in Lake Washington and Sequim Bay. Lessons learned during those early tests prompted development of automatic swarm management software for faster reprogramming in the field, and provided initial data sets essential for building our data analysis techniques.

Trevor Harrison throws a µFloat into Sequim Bay, WA during a flood tide in May 2019. Initial testing was performed with support from PNNL’s Marine Sciences Laboratory. Photo Credit: Paul Murphy
Benchmarking Float Performance:
Progress on the µFloats continued in 2020, working carefully within COVID-19 safety protocols.
Quiescent Water - Lake Washington - July 2020
In July, we tested the depth control and underwater localization in Lake Washington in July 2020. The floats held depth to within 10 cm, over a range of depths, and limiting the vertical float speed proved an effective way to manage overshoot and ensure consistent performance across floats. Localization was degraded by a strong sound speed gradient: summer weather heats the surface waters of the lake (top 10 m), while waters at depth stay quite cool. The resulting acoustic messages we rely on for localization are bent downwards, limiting range. Nonetheless, we were able to demonstrate localization accuracy within 5 m when messages connectivity was achieved. The design and results of benchmarking testing are in preparation for publication.
Tidal Channel - Agate Pass - August 2020
Confident from our success from all previous field tests, we performed our first full field test of the float swarm in Agate Pass, WA on August 18th and 20th, in an effort to map - in 3D - the tidal currents present there. Over those two days, we ran seventeen, 20-minute surveys, each with approximately twenty floats, covering both ebb and flood cycles, and totaling 340 individual float deployments. Data from a traditional instrument for measuring water currents (acoustic Doppler current profilers) were also collected and µFloat measurements were shown to match within 10% of the nominal site velocity. Full analysis of the results are in preparation for publication.
Research Team:










More information:
Comparative evaluation of volumetric current measurements in a tidally-dominated, coastal setting: a virtual field experiment. T Harrison, KM Thyng, B Polagye - Journal of Atmospheric and Oceanic Technology (1/24/2020)
Harrison, T. System Identification and Observer Design for the µFloat. Poster presented at PMEC All-Center Meeting. September 2019. Portland, OR.
Harrison, T., Noe, J., Crisp, C., Murphy, P., Joslin, J., Stewart, A., Mundon, T., Polagye, B. Preliminary design and benchmarking of the µFloat: a buoyancy-actuated float for coastal waterways. Currents, Waves, and Turbulence Measurement Workshop and Applications 2019. March 2019. Sand Diego, CA.
Harrison, T. Volumetric sensing for a swarm of underwater floats. General Examination for PhD Candidacy. University of Washington, Seattle, WA. January 2018.
Harrison, T., Polagye, B. Modeling of subsurface Lagrangian sensor swarms for spatially distributed current measurements in high energy coastal environments. Poster presented at AGU Ocean Sciences 2016. February 2016. New Orleans, LA.
Sponsors:
Trevor Harrison was supported by National Science Foundation Graduate Research Fellowship under grant number DGE-1762114. Funding for construction of the float swarm was provided by ONR DURIP N00014-17-1-2336. Testing of floats as opportunistic targets and resource characterization sensors is supported by Naval Facilities Engineering Command under award N00024-10-D-6318, #0076.
The project team gratefully acknowledges input from UW-APL staff: specifically, Paul Gibbs and Alex de Klerk for captaining vessels for field tests, Kevin Zach and Able Baca for electrical engineering and assembly, and Justin Burnett for mechanical design. Several UW undergraduate students have contributed time with a special thanks to Jack Ryan and Kira Smith who helped with swarm assembly. We are also thankful for conversations with Tim Mundon (Oscilla Power), Fritz Stahr (MRV Systems), Rick Rupan (UW-Oceanography), Jim Osse (NOAA-JISAO), and Eric D’Asaro (APL-UW).
Last updated: November 4, 2019